C / C++ HDR rgbe 讀檔 與 色調映射(toneMapping) 實作範例代碼

以前做的作業整理起來順便發表上來,使用的方法是最簡單的能看能主的方法,並沒有任何優化。
參考論文:
細節與對比強化之高動態範圍影像顯示方法
High Dynamic Range Image Display with Detail and Contrast Enhancement
High Dynamic Range Image Display with Detail and Contrast Enhancement
本篇不是實現上述論文,實現的是他提到的先前的方法
基於這個公式做色調映射:

基於這個公式做色調映射:
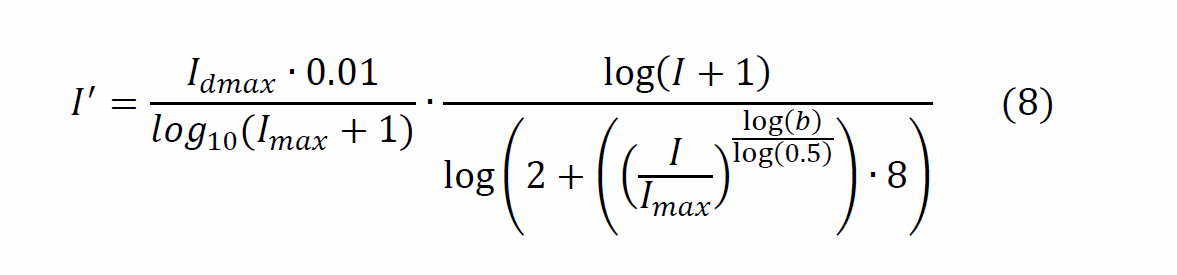
色調映射有分全域與局域(本文實作的是全域),全域就是同一個公式對整張圖的每個點做,比較簡單迅速,缺點是可能會有某些地方表現不好,通常是最亮或是最暗的地方。需要比較好看的話要做局域色調映射,針對特別亮或暗的地方做不同處理。
使用函式庫:
流程
- 讀取 rgbe 轉換為 rgb
- 轉換彩色模型至 Yxy
- 對亮度通道做色調映射(tone mapping)
- 色彩模型轉回 rgb
- 進行 gama 校正 (微軟 Win10 設置為 2.2)
- 完成 global tone mapping
讀取 rgbe 轉換為 rgb
使用函式庫 rgbe 讀取,如果要重刻過程其實還蠻麻煩的~
使用的資料結構
struct basic_rgbeData {
int width;
int height;
rgbe_header_info info;
vector<float> img;
};
讀取的程式
void rgbeData_read(basic_rgbeData& hdr, string name) {
FILE* hdrFile;
fopen_s(&hdrFile, name.c_str(), "rb");
// 讀檔頭
RGBE_ReadHeader(hdrFile, &hdr.width, &hdr.height, &hdr.info);
// 要求空間
hdr.img.resize(hdr.width*hdr.height*3);
// 讀rgbe
RGBE_ReadPixels_RLE(hdrFile, hdr.img.data(), hdr.width, hdr.height);
fclose(hdrFile);
}
讀進來之後就可以獲得圖像的長寬與 rgb 值了,這裡的rgb值會是小數點介於 0~1 之間,可以直接全部*255,然後把圖片顯示出來就可以看到黑黑的圖像了。
大於255的就變成255,小於0的就變成0

轉換彩色模型至 Yxy
把色彩模型從 rgb 轉換至 Yxy,實際上轉了兩次 rgbe -> yxz -> Yxy,因為公式可以合併並不衝突,我把它寫在一起了。(Yxy只是將ZXY轉換到坐標系上)
這個做是為了分離出光源與彩度,需要做處理的是光源,彩度則維持原本的樣子。
這個做是為了分離出光源與彩度,需要做處理的是光源,彩度則維持原本的樣子。
void rgb2Yxy(const float* src, float* dst, int size) {
//#pragma omp parallel for
for(int i = 0; i < size; ++i) {
float a, b, c;
a = (0.412453) * src[i*3 + 0]+
(0.357580) * src[i*3 + 1]+
(0.180423) * src[i*3 + 2];
b = (0.212671) * src[i*3 + 0]+
(0.715160) * src[i*3 + 1]+
(0.072169) * src[i*3 + 2];
c = (0.019334) * src[i*3 + 0]+
(0.119193) * src[i*3 + 1]+
(0.950227) * src[i*3 + 2];
dst[i*3 + 0] = b;
dst[i*3 + 1] = a / (a+b+c);
dst[i*3 + 2] = b / (a+b+c);
}
}
#pragma omp parallel for是平行算的標記,下面接著的for迴圈會被展開來平行運算。
對亮度通道做色調映射(tone mapping)
這裡就是全文的重點了,來自於上面介紹的公式。
其中的 dmax 與 b 來源是依據論文所提的建議設置
size是圖像的指標dst的總長度
#define HDR_dmax 100.0
#define HDR_b 0.85
void globalToneMapping(float* dst, int size, float dmax, float b)
{
constexpr int dim = 3; // 幾個通道
constexpr int rgb = 0; // 選擇哪個通道
float maxLum = dst[rgb];
for(unsigned i = 1; i < size; ++i) {
if(dst[i*dim+rgb] > maxLum)
maxLum = dst[i*dim+rgb];
}
float logSum = 0.0;
for(int i = 0; i < size; ++i)
logSum += log(dst[i*dim+rgb]);
const float logAvgLum = logSum/size;
const float avgLum = exp(logAvgLum);
const float maxLumW = (maxLum / avgLum);
const float coeff = (dmax*float(0.01)) / log10(maxLumW+1.0);
#pragma omp parallel for
for(int i = 0; i < size; ++i) {
auto& p = dst[i*dim+rgb];
p /= avgLum;
p = log(p+1.0) / log(2.0 + pow((p/maxLumW),(log(b)/log(0.5)))*8.0);
p *= coeff;
}
}
色彩模型轉回 rgb
跟剛剛的公式一樣只是反轉回來RGB模型
void Yxy2rgb(const float* src, float* dst, int size){
//#pragma omp parallel for
for(int i = 0; i < size; ++i) {
float a, b, c, newW;
newW = src[i*3 + 0] / src[i*3 + 2];
a = src[i*3 + 0];
b = newW * src[i*3 + 1];
c = newW - b - a;
dst[i*3 + 0] = float(3.240479)*b;
dst[i*3 + 0] += -float(1.537150)*a;
dst[i*3 + 0] += -float(0.498535)*c;
dst[i*3 + 1] = -float(0.969256)*b;
dst[i*3 + 1] += float(1.875992)*a;
dst[i*3 + 1] += float(0.041556)*c;
dst[i*3 + 2] = float(0.055648)*b;
dst[i*3 + 2] += -float(0.204043)*a;
dst[i*3 + 2] += float(1.057311)*c;
}
}
轉回來之後就已經映射完畢可以輸出來看看,與一開始相比過亮與過暗的地方已經修正完畢可以看到細節,但是整體偏暗許多需要再進行下一步修正。

進行 gama 校正
最後要將亮度調整到作業系統適合的參數,圖像一般都在
1.0 ,而Windwos系統使用的是 2.2 要將它修正到正確的參數即可。
gama參數這個資訊可以從結構裡面我們一直沒用到參數
rgbe_header_info info; 裡獲得。#define HDR_gama 2.2
void gama_fix(float* dst, int size, float gam) {
const float fgamma = (0.45/gam)*2.0;
float slope = 4.5;
float start = 0.018;
// 判定係數
if(gam >= float(2.1)) {
start /= ((gam - 2) * float(7.5));
slope *= ((gam - 2) * float(7.5));
} else if(gam <= float(1.9)) {
start *= ((2 - gam) * float(7.5));
slope /= ((2 - gam) * float(7.5));
}
// 校正像素
#pragma omp parallel for
for (int i = 0; i < size*3; i++) {
if(dst[i] <= start) {
dst[i] = dst[i]*slope;
} else {
dst[i] = float(1.099)*pow(dst[i], fgamma) - float(0.099);
}
}
}
完成 global tone mapping
再來結構的裡的圖像就可以使用摟,把它印出來。
轉出來的數值還是 0~1 要把他們 *255
轉出來的數值還是 0~1 要把他們 *255
然後大於255的就變成255,小於0的就變成0
hdr.bmp("resultIMG/HDR_IMG.bmp");

專案原始碼
未封裝測試代碼可以參考 OpenHRD.cpp 中的 testMapping() 如下,比較容易讀懂在寫什麼。
rgbeData_writeBMP 是將 float* 輸出成 *.bmp 圖檔到硬碟上使用函式庫 OpenBMP
void testMapping(string name) {
// read file
basic_rgbeData hdr;
rgbeData_read(hdr, name);
rgbeData_info(hdr);
//rgbeData_writeBMP(hdr, "resultIMG\HDR_non.bmp");
// Mpping
int imgSize = rgbeData_size(hdr);
vector<float> Yxy(imgSize*3);
rgb2Yxy(hdr.img.data(), Yxy.data(), imgSize);
globalToneMapping(Yxy.data(), imgSize);
Yxy2rgb(Yxy.data(), hdr.img.data(), imgSize);
//rgbeData_writeBMP(hdr, "resultIMG\HDR_mapping.bmp");
cout << hdr.info.gamma << endl;
gama_fix(hdr.img.data(), imgSize, 2.2);
rgbeData_writeBMP(hdr, "resultIMG/HDR_IMG.bmp");
}
這裡是完整的專案已經封裝成完整的物件:OpenHDR for VS2017












